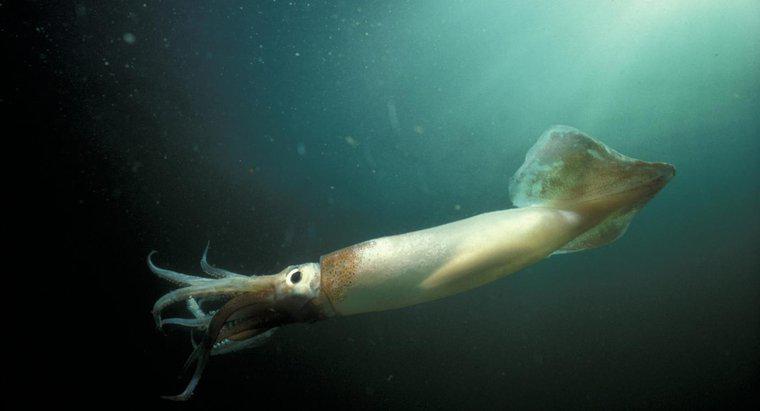
Un calamaro si muove usando un sistema di propulsione a getto, tirando acqua nella sua cavità del mantello, contraendo i muscoli della parete del mantello ed espellendo l'acqua attraverso il suo sifone o imbuto. Le pinne aiutano la manovrabilità e aiutano anche con il sollevamento e il movimento mentre il calamaro viaggia a basse velocità.
Un calamaro ha un sistema di imbuto per l'assunzione e un altro per l'uscita. Il mantello si espande mentre il calamaro attira acqua in esso. Quando è pieno, l'assunzione si chiude. I forti muscoli del mantello si contraggono, l'imbuto di deflusso si apre e la pressione del fluido nel mantello crea energia cinetica che spinge il calamaro in una rapida raffica di velocità. I calamari sono in grado di raggiungere i 25 km /h, rendendoli gli invertebrati marini più veloci. Quando un calamaro sta nuotando costantemente, attira ed espelle l'acqua in uno schema pulsante, attingendo più acqua per raffica quando vuole aumentare la velocità.
Controllando la direzione dell'imbuto di deflusso, un calamaro è in grado di controllarne la direzione di nuoto. Può andare indietro, avanti, girare o librarsi. Quando fuggono dalla predazione, un calamaro affronta il suo imbuto in avanti e getta all'indietro. Quando attacca la preda, affronta il suo imbuto all'indietro in modo che possa avvicinarsi frontalmente. I ricercatori hanno studiato la locomozione dei calamari durante la progettazione di sistemi di propulsione a getto meccanico come i turbojet.